







Radiolink Pixhawk v3 design manual
fmuv3 firmware
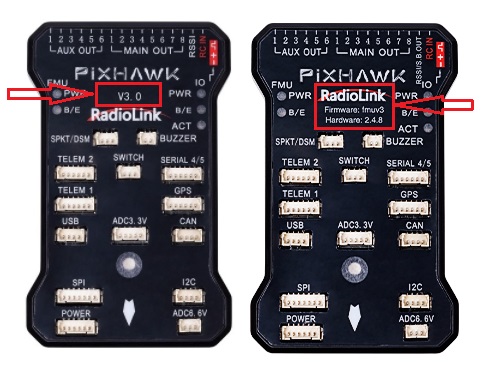
radiolink pixhawk v3 design
fmuv2 firmware
radiolink pixhawk v2 design
Radiolink Pixhawk PIX 2.4.8 APM 32 Bit Flight Controller FC with GPS M8N SE100 for RC FPV Drone Quadcopter/6-8 Axis Multirotor
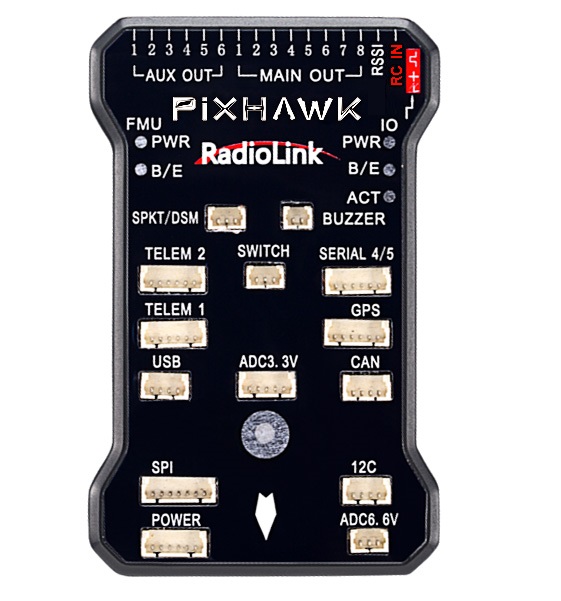
PIXHAWK Flight Controller
Based on the original functions of the 3DR PIX, almost two years of technical development in the field of flight controllers by the Radiolink technical team, redesigned and innovated the PIX original circuit, and repeatedly tested the function to achieve better performance.
Anti-static from SMT to welding, all the chips, processor, sensors and others are import with whole package by primary agency, dust-free environmental protection workshop and automatic manufacture ensure the PIXHAWK are durable.
Reduce the mutual interference of the internal components of the flight control board, achieve noise less, more accurate of compass, and make flight safer.
User Instruction Reference:http://ardupilot.org/planner/docs/mission-planner-overview.html
radiolink pixhawk v3 design Features:
- 【High-end Configuration】–Advanced 32F427 ARM Cortex M4 Core high-performance processor, 32bit fail-safe co-processor, MPU 6000 3-axis accelerometer.
- 【Excellent Performance】–New layout and technical upgrade base on 3DR PIX. A powerful hardware device can create, you can implement more functions as you want by simple programming.
- 【Stabilization】–Producing by automatic and unique automation software testing, it achieved interference less from inner components, built-in barometer sensor to make altitude hold stabilization.
- 【Easier Setting】–No complicated setup for beginner and professor player, easy to operation calibration settings on Mission Planner, you will have a good experience of using Radiolink Pixhawk.
- 【Multiple Function】–Support OSD and GPS module and more, suit for Long-wheelbase Quadcopter/6-8 Axis Multirotor.
radiolink pixhawk v3 design Description:
Top Configuration
- 32 bit 32F427 ARM Cortex M4 Core + FPU (floating point unit)
- 168 MHZ / 256 KB RAM / 2 MB Flash
- 32bit Fault Protection Coprocessor
- ST Micro L3GD20H 16 bit gyroscope
- ST Micro LSM303D 14 bit accelerometer/magnetometer
- MPU 6000 3-axis accelerometer/gyroscope
- MEAS MS5611 barometer
Easy to Set Up
No complicated setup for beginner and professor player, download the Mission Planner from Radiolink website. Via USB cable connect PIX and computer, easy to operation calibration settings on Mission Planner. Then, enjoy your fly.
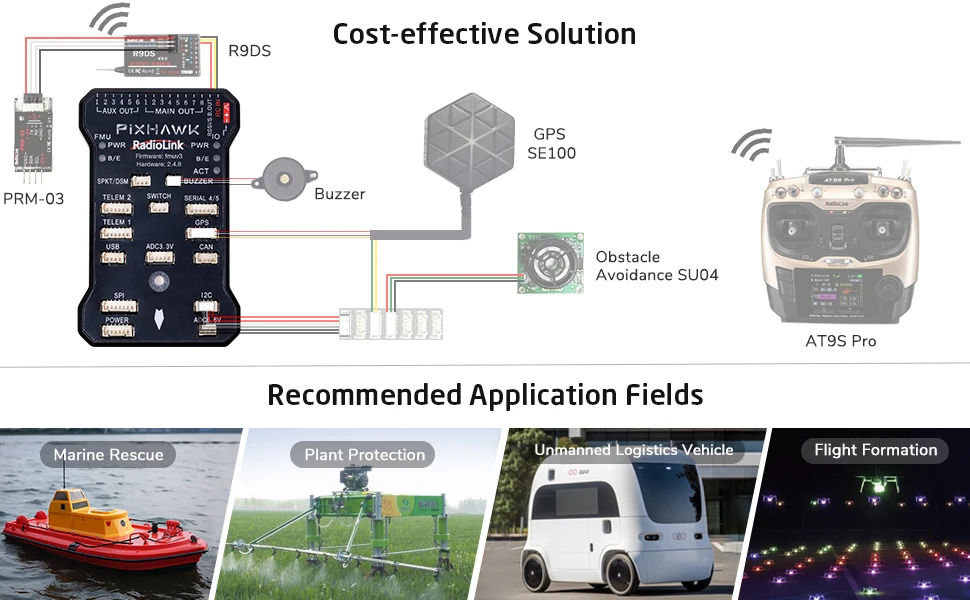
A Good Choice for DIY Drone
Complete installation tutorial, easy to set up, eliminating the cumbersome and complicated installation and calibration process, making your DIY racing drone easier. The Mission Planner can be downloaded from the official website of the Radiolink brand for debugging.
Radiolink PIXHAWK supports a variety of fixed-wing and helicopters, vehicle models and boat models. Supporting Althold, Stabilize, Loiter, Poshold, Return and other flight modes.
PIXHAWK Flight Controller Specifications:
- Connector Port: JST GH connector
- Receiver In: PPM/SBUS
- Transmitter: 6 oneshot/PWM
- USB Voltage: 5v+-0.3v
- Work Voltage: 5.1v
- Work Temperature Rang: -40~80°
- Support Models: Long-wheelbase Quadcopter/6-8 Axis Multirotor
- Mini Pix Size: 8.2*4.3*1.7cm
- Weight: 30g
Package Included(Separately Purchase Pixhawl)
- PIXHAWK x 1
- Power Module (2s-12s)x 1
- Safety Button x 1
- Double-Sided Adhesive Tape x2
- Buzzer x 1
- Micro-SD TF Card(4G) x 1
- Three-wire Servo Cable x 1
- Safety Button Connect Cable x1
- Receiver Connect Cable x1
- Power Module Connect Cable x1
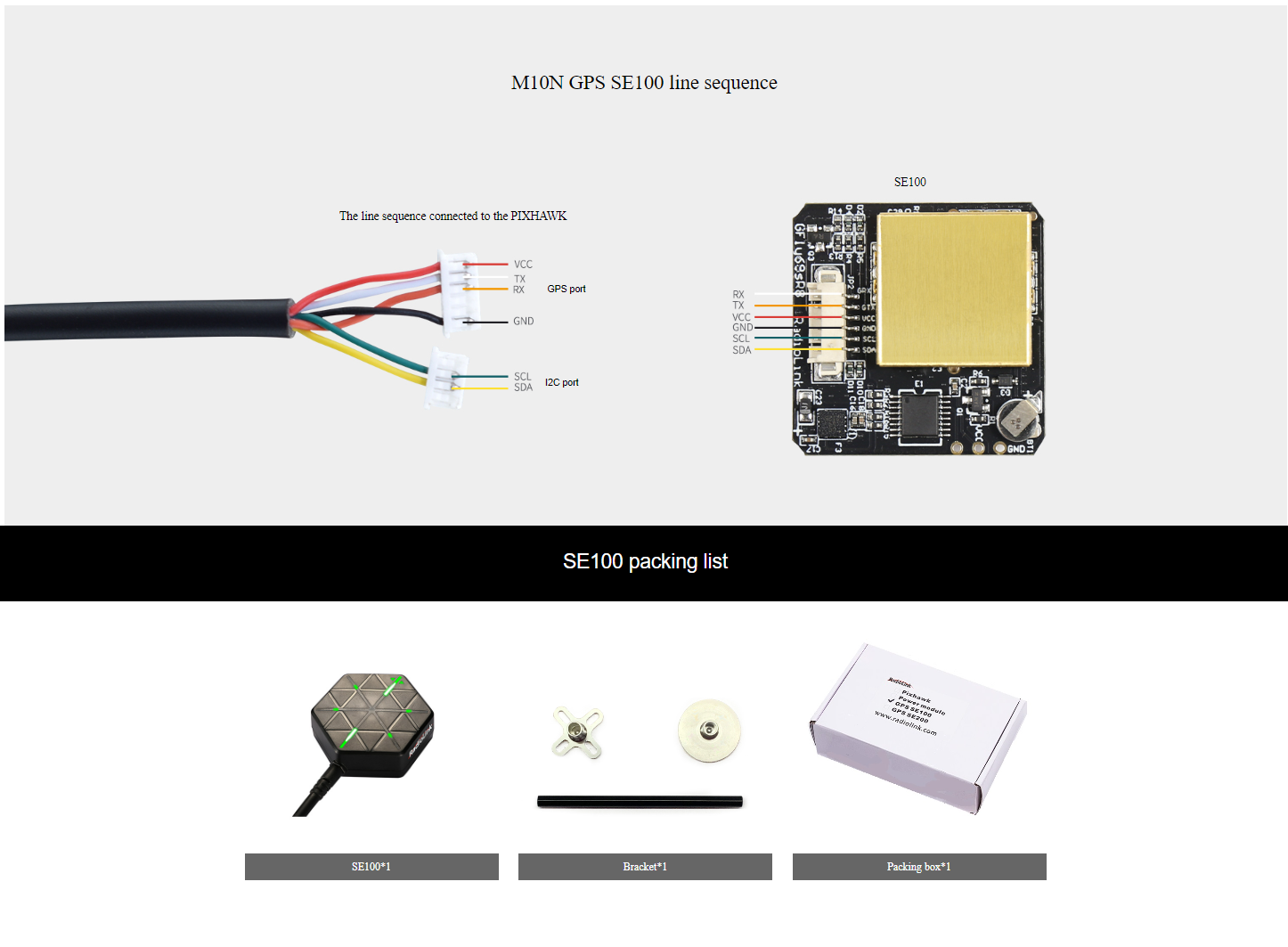
SE100 GPS Module
SE100 GPS Features:
【Mini Size】: This mini GPS for Radiolink Pixhawk Flight Controller, only 1.89*1.6*0.59in, it’s perfect for you racing drone and quadcopter. 【Excellent Stable】: The ceramic antenna design have enhances the ability to get extremely weak signal even though interference by ideal filter.Double Filter:SAWF(Surface acoustic wave filter)form Murata,Independent dual filtering technology, stronger anti-interference ability.
Ublox M10050 module, built-in IST8310 high-precision electronic compass (I2C interface)
2.5dbI high gain and high selectivity ceramic antenna.
GPS dedicated high gain (20dB) MMIC chip.
Two-stage Murata surface acoustic filter, front dual filter design, stronger anti-interference ability.
SE100 GPS Module Specification:
- Velocity Precision: 0.1m/s
- Max Height: 50000m
- Max Speed: 515m/s
- Max Acceleration: 4G
- Update Rate: 10Hz
- Time to First Fix: Cold start: 26s, Hot start: 1s
- Power Supply: voltage 5VDC±5%
- Size: 1.89*1.6*0.59in
- Current: 50~55mA
GPS Connect Ports:
- A.GPS UART interface, baud rate: 1.2K/4.8K/9.6K/19.2K/38.4K/57.6K/112.5K
- B.Geomagnetic I2C interface
- Current: 50~55mA
- Sensitivity Tracking&Nav: -167dBm; Reacquisition: -163dBm
- Sensitivity Cold Start: -151dBm; Hot start: -159dBm
Package Include :
- M10N SE100 GPS x 1
- Metal rod bracket x 1
- Connecting cable x 1
- Metal fixing gasket x 2
- Foam fixed sticker x 1
















Weight & Dimension
Dimention: 82.2*51.8*16.5mm(3.2″*2″*0.65″)
Weight: 38g(1.34oz, PIXHAWK only)
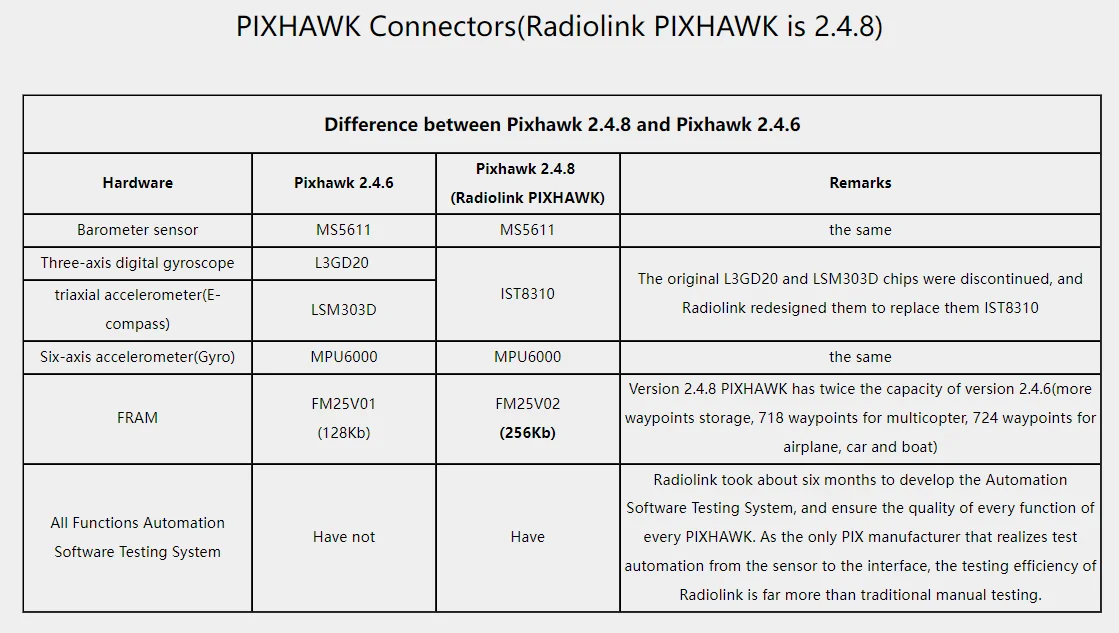
Hardware Specification
Main Processor: STM32F427VIT6
Coprocessor: STM32F100C8T6
Sensor
Gyro: MPU6000
E-compass: QMC5883L
Barometer: MS5611
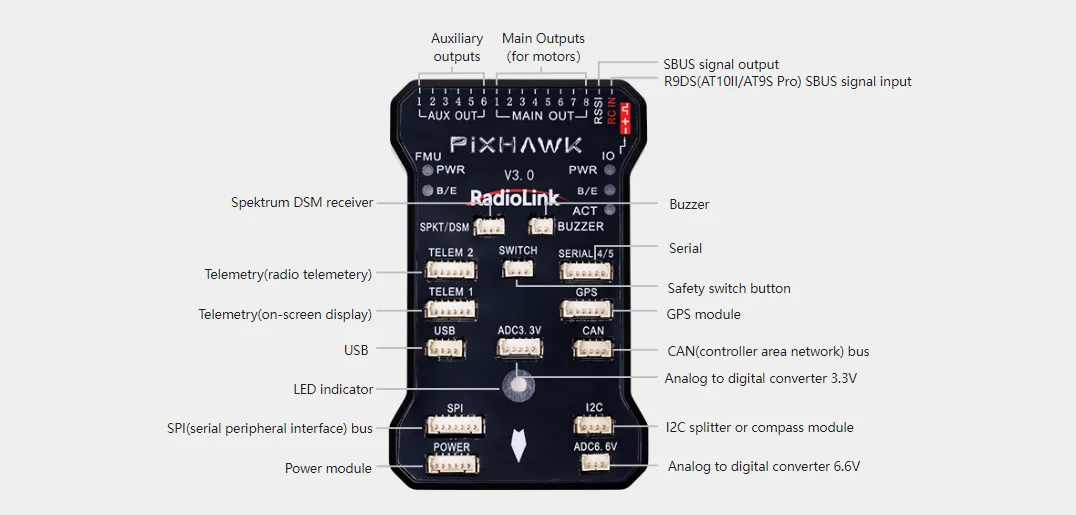
Port: XH socket
SPK/DSM: 1
Mavlink UART: 2(with CTSRTS)
USB Port: 2
BUZZER: 1
SWITCH: 1
ADC Port: 3.3V*1&6.6V*1
SERIAL4/5 Port: 1
GPS UART: 1
CAN Port: 1
SPI Port: 1
I2C Port: 1
RC In(TX Signal Supported): SBUS/PPM
RSSI ignal Strength Input: PWM/3.3V
PWM Output: 8 OneShot/PWM Output(Configurable)
Aux Output: 6 PWM Output(Configurable)
SD Card Port: 1
Power Module Specifications
Input Voltage: 2-8S
Input Current: 90A
Output Voltage: 5.1V
Output Current: 2A
Input Current(connect to one ESC only): 90A
Adaptable Models
Rotary/3-8 copter/Fixed Wing/VTOL/Car/Boat/Robot/Mower
Specifications:
USB Voltage: 5V±0.3V
Operating Temperature: -40~80℃
Advices
For the users who firstly use PIXHAWK, we suggest that you use PIXHAWK following below steps:
① You have to install the mission planner and driver from here and familiar with the menu.
Download the latest Mission Planner from here:latest Mission Planner
Download the driver form here: https://www.microsoft.com/net/download/dotnet-framework-runtime/net462
② To establish a connection you must first choose the communication method/channel you want to use, and then set up the physical hardware and Windows device drivers. You can connect the PC and autopilot using USB cables, Telemetry Radios, Bluetooth, IP connections etc.
③ Download the update firmware by USB cable if you need.
④ Connect Mission Planner to AutoPilot, and then connect receiver to AutoPilot to finish the calibration of transmitter, Accelerometer and compass.
⑤ Setup RC transmitter flight mode.
⑥ Assemble aircraft and finish the pre-flight checklist.
⑦ PID usage.
⑧ Advanced configuration.

Reviews
There are no reviews yet