


MATEKSYS Optical Flow Lidar Sensor – 3901-L0X
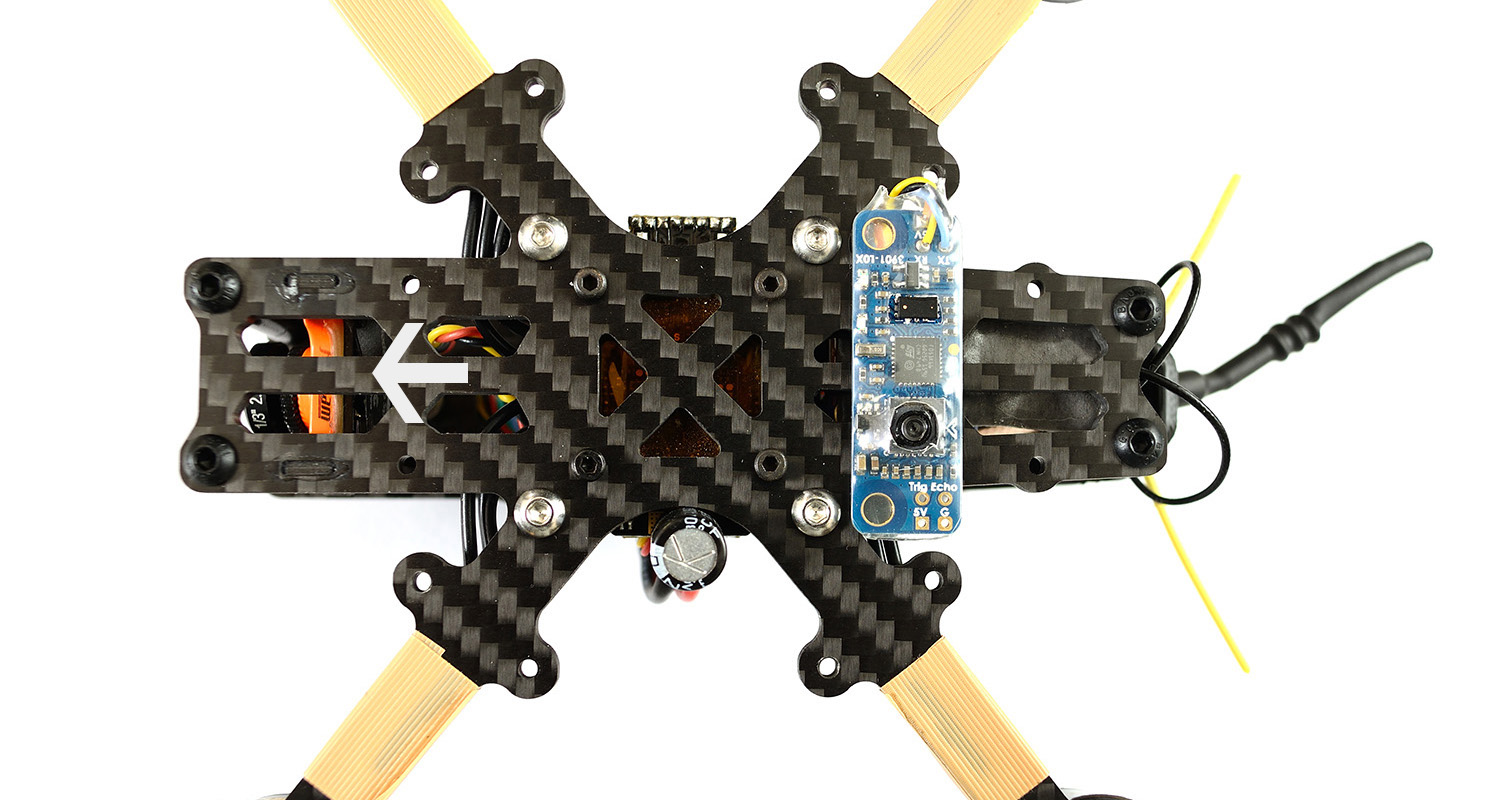
MATEKSYS Optical Flow Lidar Sensor – 3901-L0X This sensor works the same way as an optical mouse, helping your iNAV quad maintain position without GPS! This module also integrates a laser time-of-flight range sensor.
MATEKSYS Optical Flow & Lidar Sensor Specifications
- Optical Flow: PMW3901
- Lidar: VL53L0X
- Interface UART
- Protocol: INAV MSP
- Working Range: 8cm~200cm
- Field of view: 42 degree(PMW3901), 27 degree(VL53L0X)
- Minimum Illumination >60Lux
- Input voltage: 4.5~5.5V
- Power Consumption: 40mA
- Size: 36*12mm, 2g
Tips
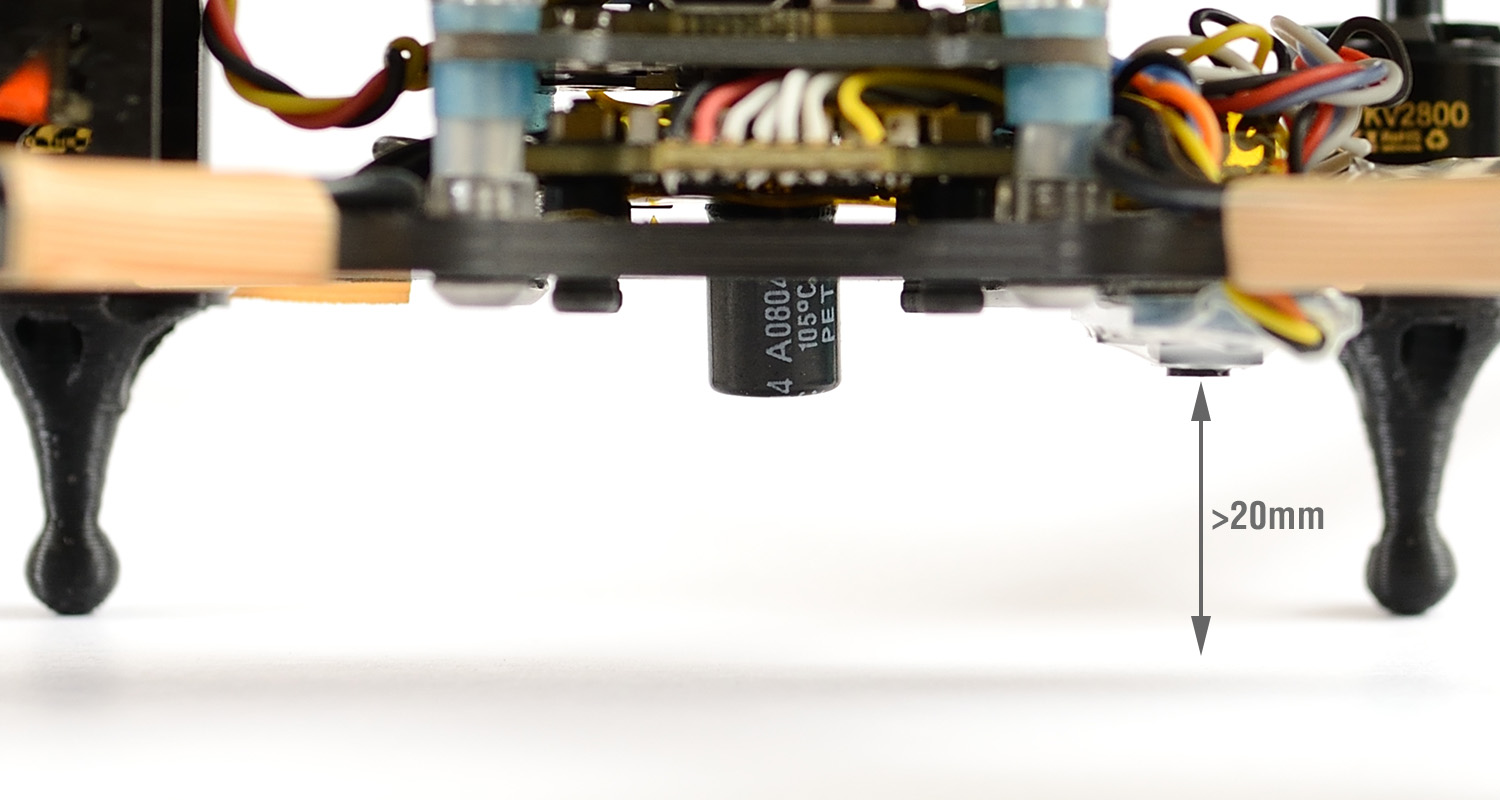
- Make sure Optical Flow lens to ground >2cm for opflow initialization while FC starting up.
- The Maximum range of VL53L0X is 2m, Altitude hold 0~2m @ throttle 0~100% if VL53L0X is enabled.
- Any unused UART of FC supports it
- Sonar connection (Trig & Echo) has not been implemented
(Click Here For Setting Up Instructions)
ArduPilot wiki:
- https://ardupilot.org/copter/docs/common-mateksys-optflow-3901L0X.html
- https://ardupilot.org/copter/docs/common-optical-flow-sensor-setup.html#optical-flow-sensor-testing-and-setup
- SERIALn_PROTOCOL = 32, “n” is serial number of UART in ArduPilot hwdef, not the FC UART number. On some flight controllers, serial1 is not equal to UART1, Pls checkout FC manual to get corresponding serial number for each UART.
- SERIAL_BAUD = 115
- RNGFND_TYPE = 32
- FLOW_TYPE = 7
- FLOW_FXSCALER = -800
- FLOW_FYSCALER = -800
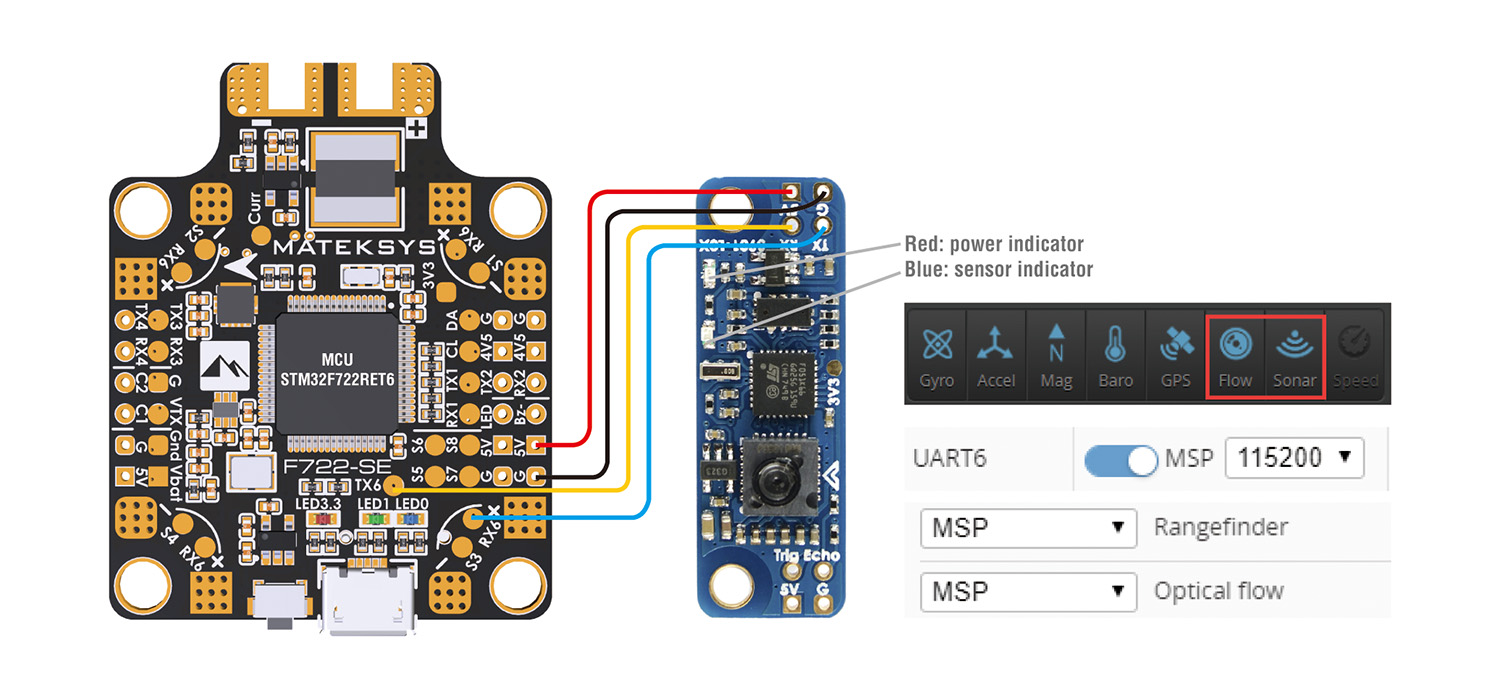
Communication between 3901-L0X module and Flight controller via UART MSP V2 protocol supported by INAV and ArduPilot.
There is no detailed datasheet of MSP V2 protocol.
Pls refer the code in INAV and ArduPilot Github
Includes
- 1 x Matek Optical Flow & Lidar Sensor – 3901-L0X

Reviews
There are no reviews yet